
Robot kroczący
PAT.234320
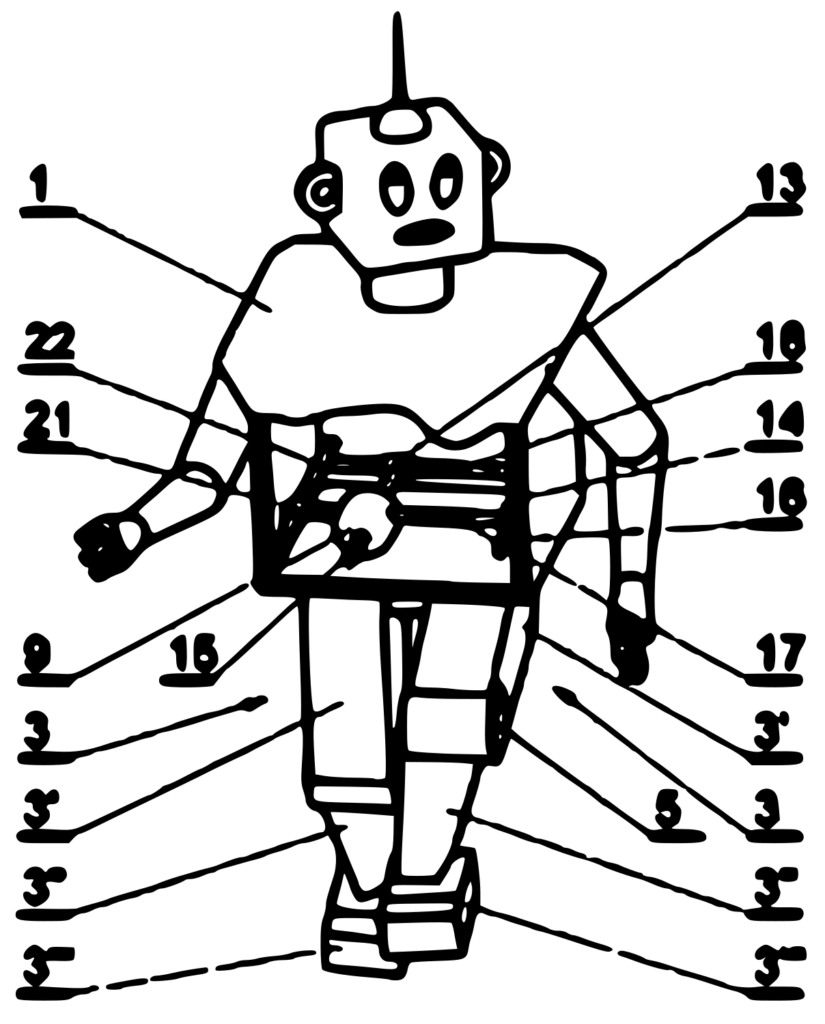
Robot ma korpus (1) z nogami (3), blok sterujący podzespołami robota, czujnik położenia rozmieszczone w robocie i połączone z blokiem sterującym, oraz przeciwwagę (9) z mechanizmem napędowym, przemieszczaną tym mechanizmem względem korpusu (1) w celu osiągnięcia przez robota punktu zerowego momentu. Przeciwwaga (9) zamocowana jest przesuwnie w korpusie (1) na co najmniej pierwszej i drugiej parze poziomych prowadnic liniowych (15, 16, 17, 18) za pośrednictwem łożysk liniowych (14) przesuwających się po tych prowadnicach (15, 16, 17, 18). W każdej parze prowadnic (15, 16, 17, 18) ich osie są do siebie równoległe. Osie pierwszej pary prowadnic (15, 16) są prostopadłe do osi drugiej pary prowadnic (17, 18). Z przeciwwagą (9) połączone jest łożysko liniowe pierwszej prowadnicy (16) pierwszej pary i łożysko liniowe pierwszej prowadnicy (17) drugiej pary.
Nr zgłoszenia: P. 414021
Data zgłoszenia: 06.10.2016
Nr patentu: PAT.234320
Twórca: Jan Charzewski