
Soft manipulator module; previous title: soft manipulator
PAT.226535
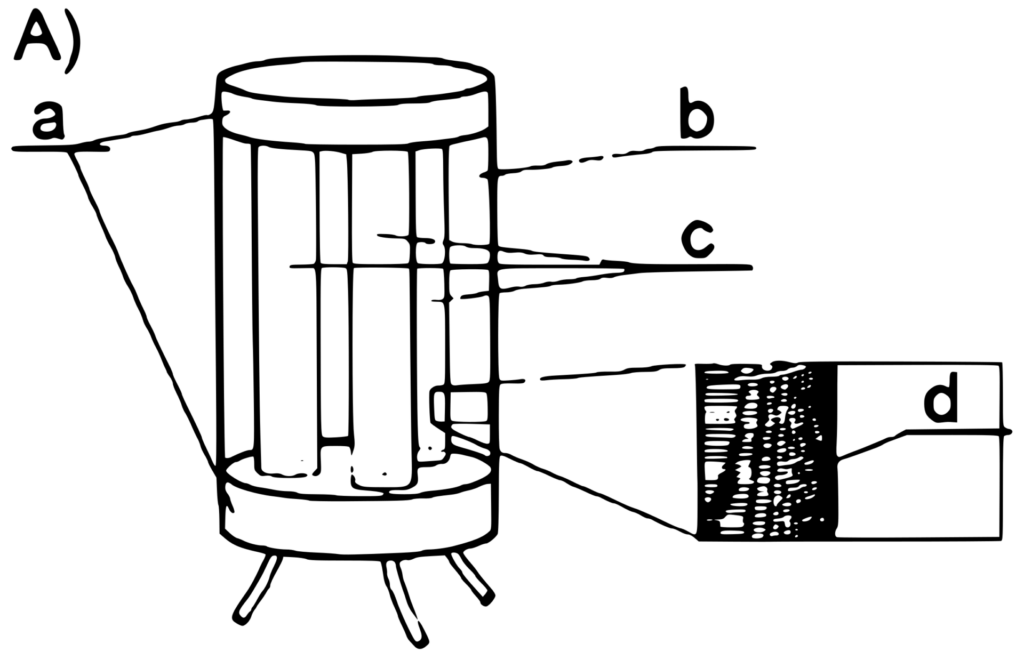
A soft manipulator for use within environments that require special precautions such as medicine, in particular minimally invasive surgery, laparoscopy and the like, as well as in environments that require the grasping of delicate and sensitive objects and tissues, consisting of a module (A) of flexible silicone, reinforced in its upper and lower layers with elements (a) of stiff silicone and having an activation part (b) made of pliable silicone, with three cylindrical chambers (c) hollowed out in the activation part (b), characterised in that each chamber is located in a separate reinforcement (d) formed by a single thread forming a spiral around the chamber (c).
Application No.: P. 409670
Application date: 01.10.2014
Patent No.: PAT.226535
Inventors: Jan Fraś, Jan Czarnkowski, Jakub Główka, Mateusz Maciaś