
Walking robot
PAT.234320
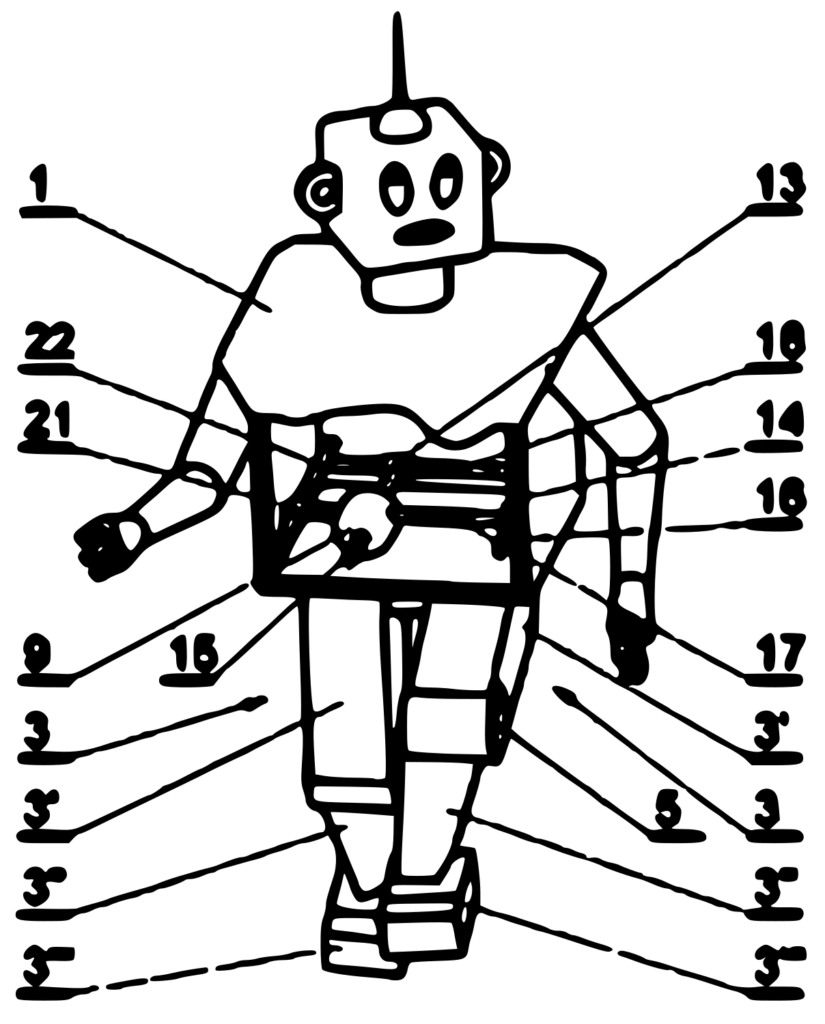
The legged walking robot comprises a body (1) with legs (3), a component control block, a position sensor arranged within and connected to the control block, and a counterweight (9) incorporating a drive mechanism, moved by this mechanism relative to the body (1) in order for the robot to reach a zero-torque point. The counterweight (9) is slidably fixed to the body (1) on at least the first and second pairs of horizontal linear guides (15, 16, 17, 18) by means of linear bearings (14) sliding along these guides (15, 16, 17, 18). In each pair of guides (15, 16, 17, 18) their axes are aligned parallel to each other. The axes of the first pair of guides (15, 16) are perpendicular to the axes of the second pair of guides (17, 18). A linear bearing of the first guide (16) of the first pair and a linear bearing of the first guide (17) of the second pair are connected to the counterweight (9).
Application No.: P. 414021
Application date: 06.10.2016
Patent No.: PAT.234320
Inventor: Jan Charzewski